Apprentissage de données fonctionnelles par modèles multi-tâches :
Application à la prédiction de performances sportives
Arthur LEROY (MAP5 - Université de Paris)
Servane GEY (MAP5 - Université de Paris)
Pierre LATOUCHE (MAP5 - Université de Paris)
Benjamin GUEDJ (INRIA - UCL)
Groupe de travail en Statistique du LMRS - Rouen - 22/10/2020
Context
Traditional talent identification: \(\rightarrow\) Best young athlete + coach intuition
G. Boccia et al. (2017) :
\(\simeq\) 60% of 16 years old elite athletes do not maintain their level of performance
Philip E. Kearney & Philip R. Hayes (2018) :
\(\simeq\) only 10% of senior top 20 were also top 20 before 13 years
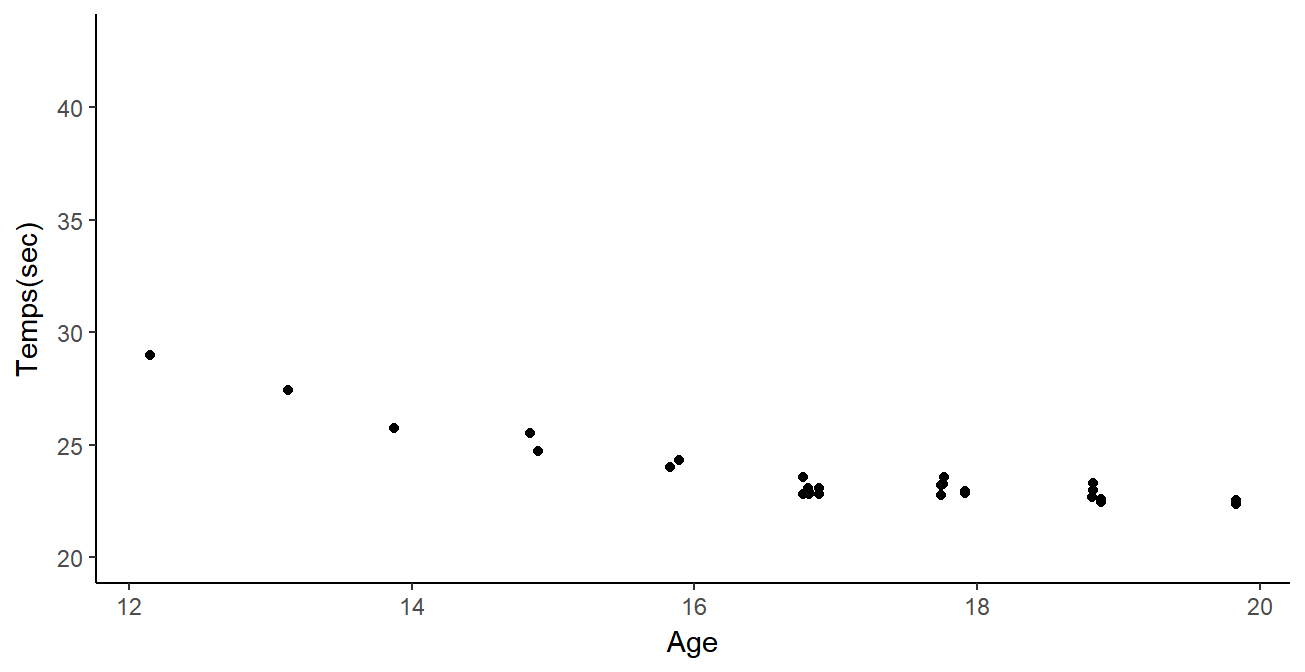
Data
Performances from FF of Swimming members since 2002:
- Irregular time series
- Different number \(N_i\) of observations between individuals
- Different observational timestamps \(t_i^k\)
- \(N_i\) \(\simeq x \times10^1\)
Data
Performances from FF of Swimming members since 2002:
- Irregular time series
- Different number \(N_i\) of observations between individuals
- Different observational timestamps \(t_i^k\)
- \(N_i\) \(\simeq x \times10^1\) | \(N\) \(= \sum\limits_{i=1}^{M}\) \(N_i\) \(\simeq x \times 10^5\)
Data
Performances from FF of Swimming members since 2002:
- Irregular time series
- Different number \(N_i\) of observations between individuals
- Different observational timestamps \(t_i^k\)
- \(N_i\) \(\simeq x \times10^1\) | \(N\) \(= \sum\limits_{i=1}^{M}\) \(N_i\) \(\simeq x \times 10^5\)
Curves clustering
Functional data \(\simeq\) coefficients \(\alpha_k\) of B-splines functions:
\[y_i(t) = \sum\limits_{k=1}^{K}{\alpha_k B_k(t)}\]
Clustering: Algo FunHDDC (Gaussian mixture + EM) Bouveyron & Jacques - 2011
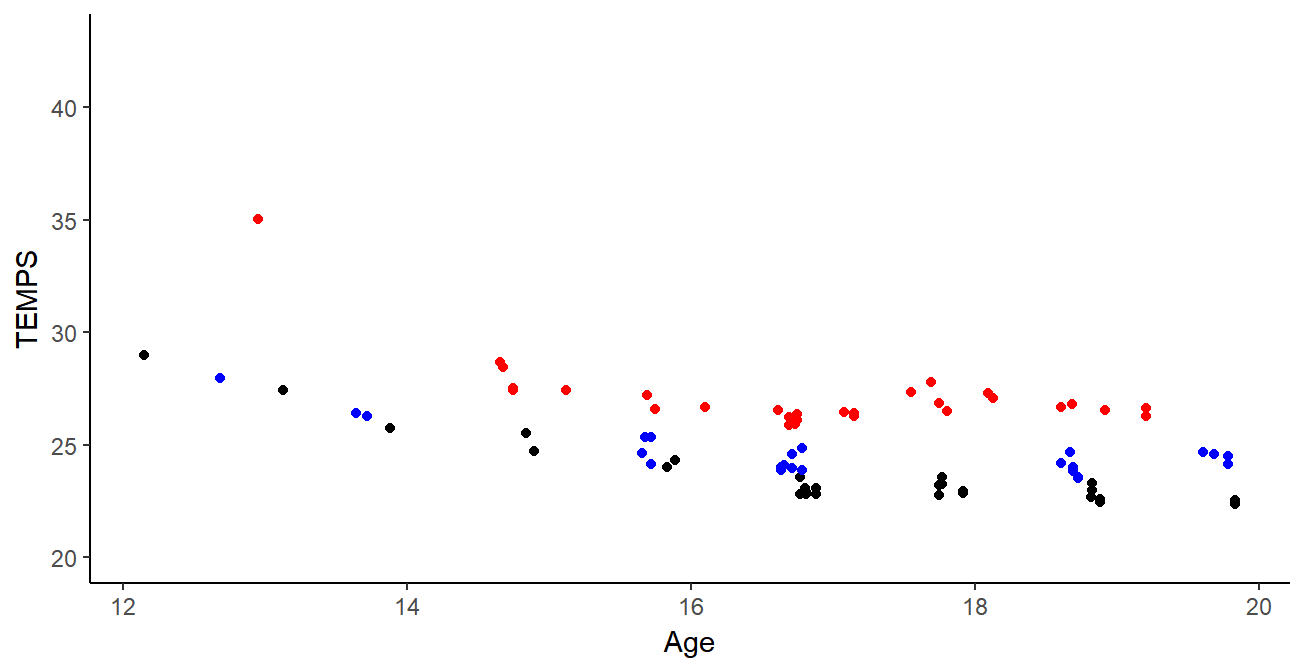
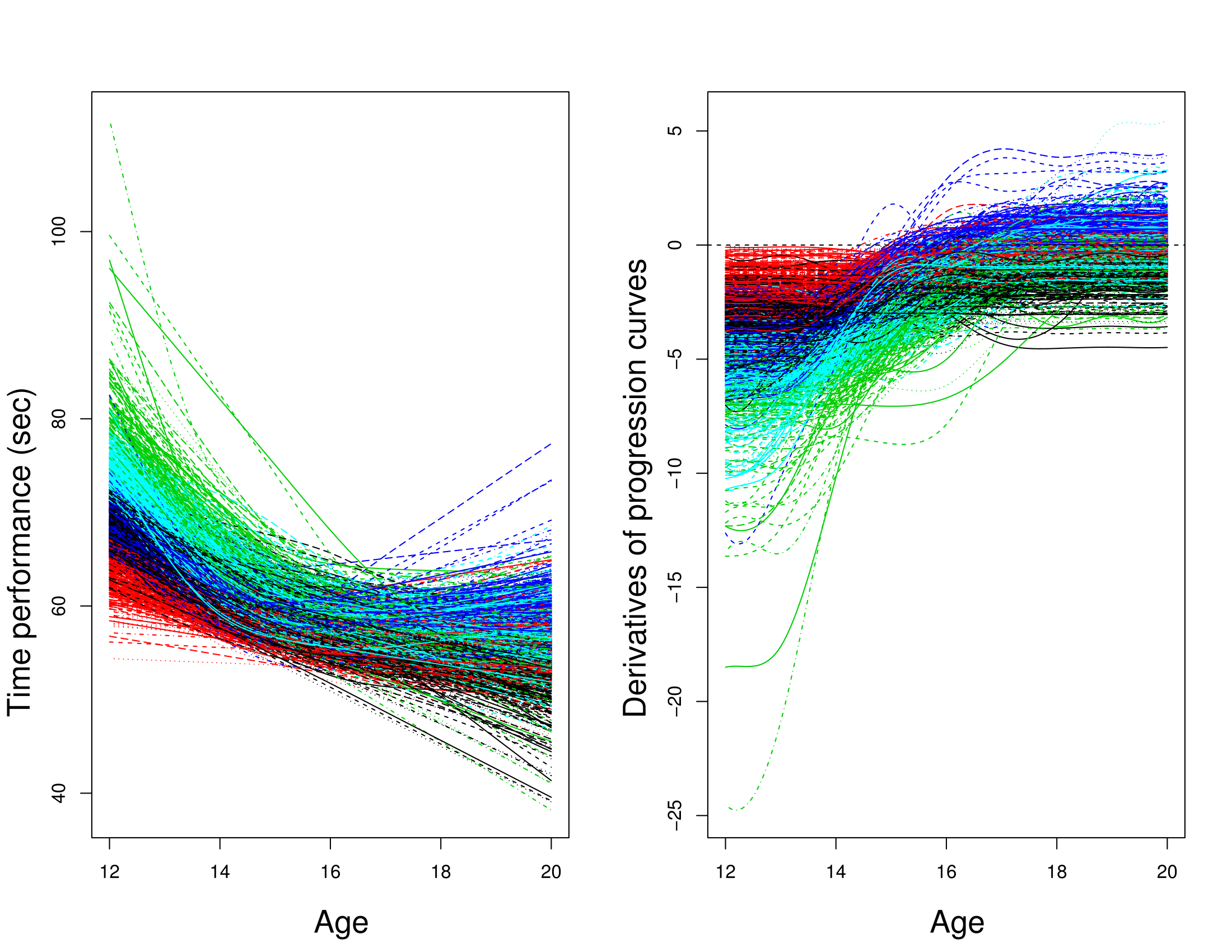
Using the multidimensional version : curve + derivative \(\rightarrow\) Information about performance level and trend of improvement
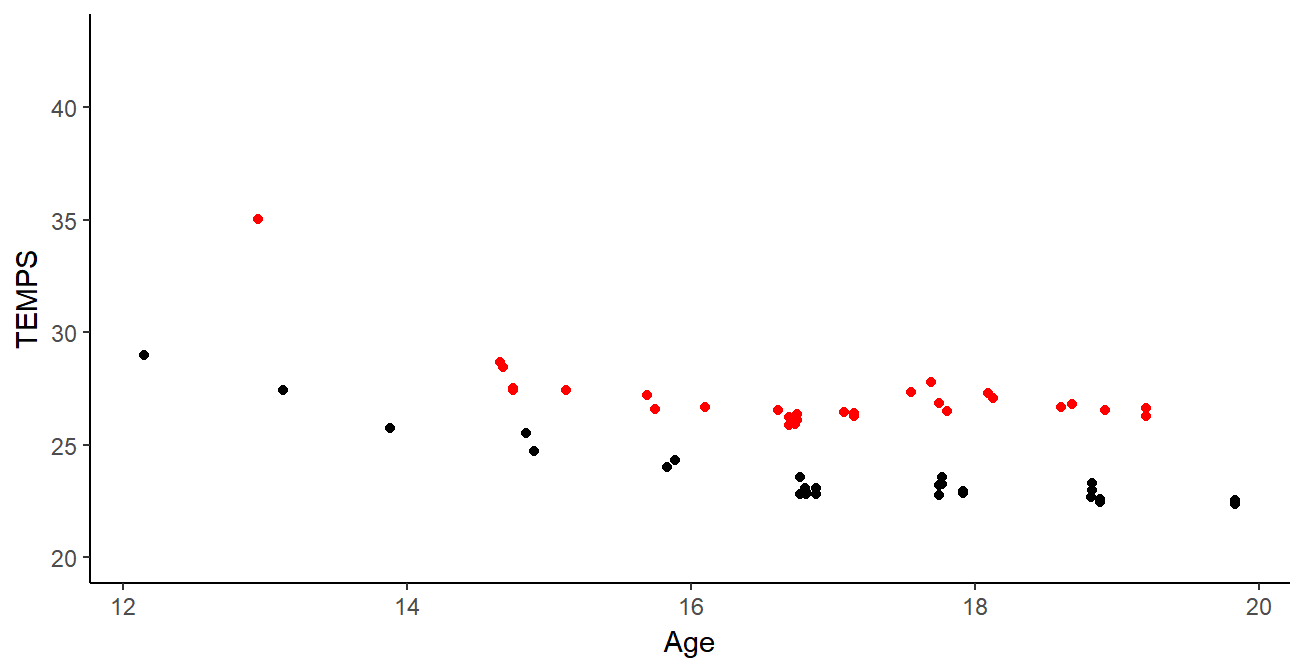
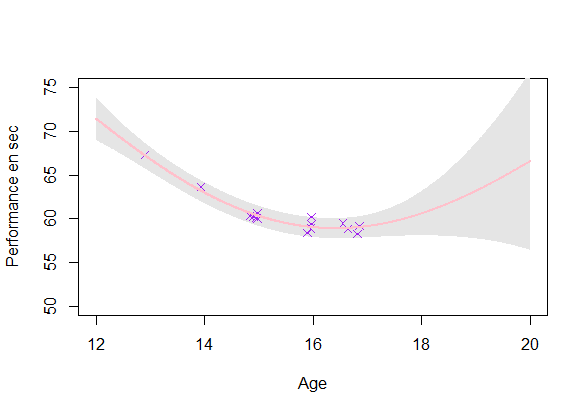
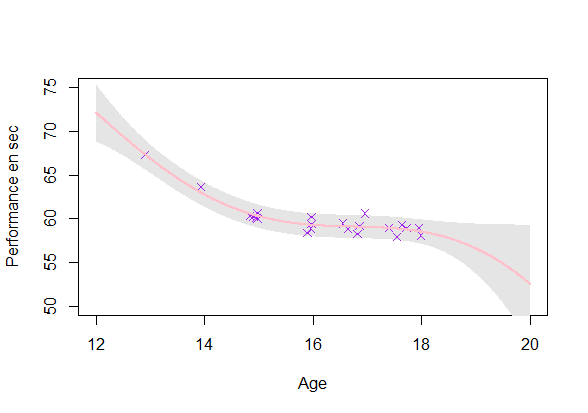
Curve clustering
Leroy et al. - 2018
- Different patterns of progression
- Consistent groups for sports experts
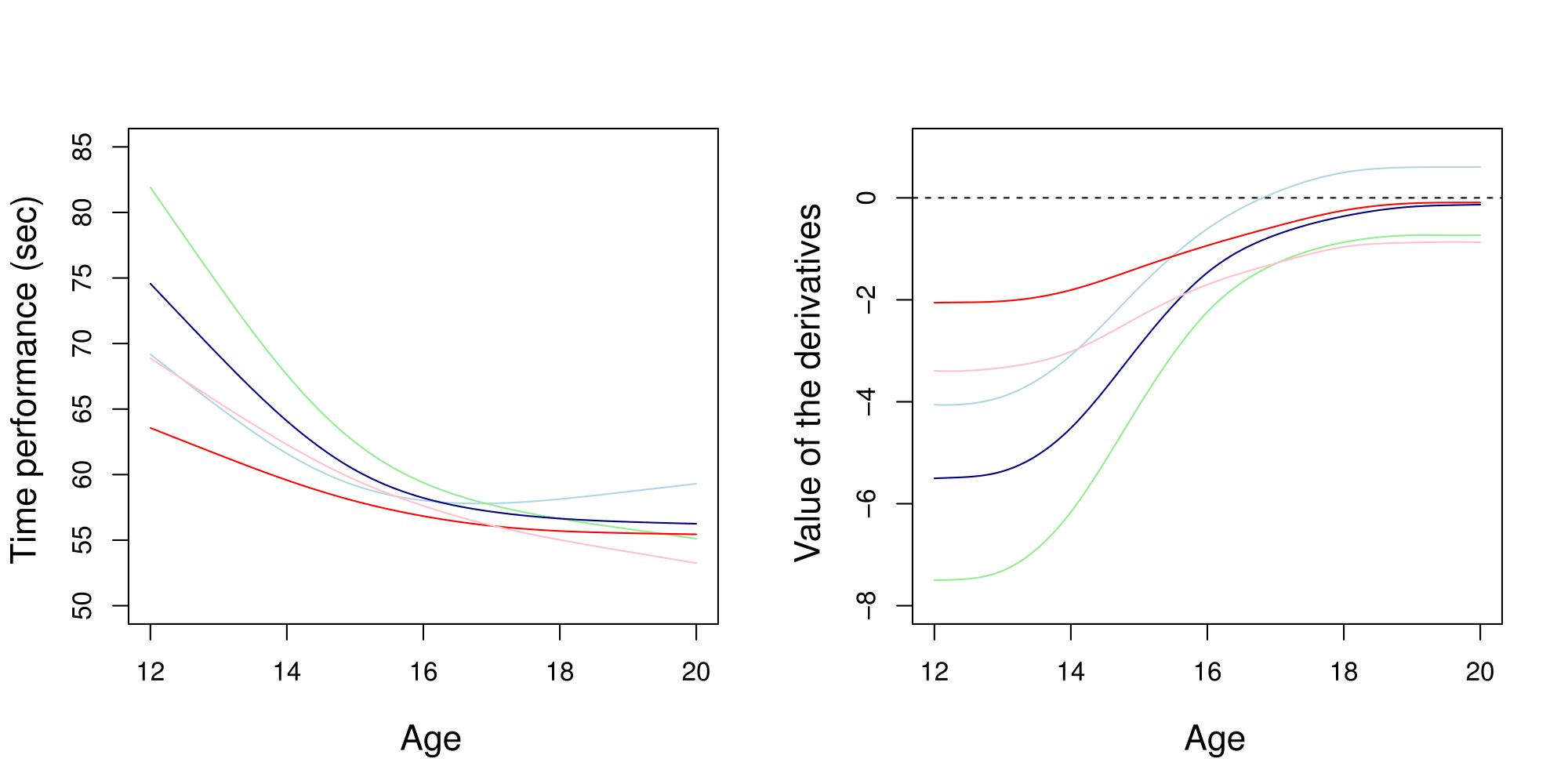
Curve clustering
Leroy et al. - 2018
- Different patterns of progression
- Consistent groups for sport experts
New objectives
- Prediction of the future values of the progression curve \(\rightarrow\) Functional regression
- Quantification of prediction uncertainty \(\rightarrow\) Probabilistic framework
Gaussian process regression
Bishop - 2006 | Rasmussen & Williams - 2006
GPR : a kernel method to estimate \(f\) when:
\[y = f(x) +\epsilon\]
\(\rightarrow\) No restrictions on \(f\) but a prior probability:
\[f \sim \mathcal{GP}(0,C(\cdot,\cdot))\]
An example of exponential kernel for the covariance function: \[cov(f(x),f(x'))= C(x,x') = \alpha exp(- \dfrac{1}{2\theta^2} |x - x'|^2)\] Kernel definition \(\Rightarrow\) prefered properties on \(f\)
Prediction
\(\textbf{y}_{N+1} = (y_1,...,y_{N+1})\) has the following prior density: \[\textbf{y}_{N+1} \sim \mathcal{N}(0, C_{N+1}), \ C_{N+1} = \begin{pmatrix} C_N & k_{N+1} \\ k_{N+1}^T & c_{N+1} \end{pmatrix}\]
When the joint density is gaussian, so does the conditionnal dentisty:
\[y_{N+1}|\textbf{y}_{N}, \textbf{x}_{N+1} \sim \mathcal{N}(k^T \color{red}{C_N^{-1}}\textbf{y}_{N}, c_{N+1}- k_{N+1}^T \color{red}{C_N^{-1}} k_{N+1})\]
- Prediction: \(\hat{y}_{N+1} = \mathbb{E}[y_{N+1}|\textbf{y}_{N}, \textbf{x}_{N+1}]\)
- Uncertainty: CI with \(\mathbb{V}[y_{N+1}|\textbf{y}_{N}, \textbf{x}_{N+1}]\)
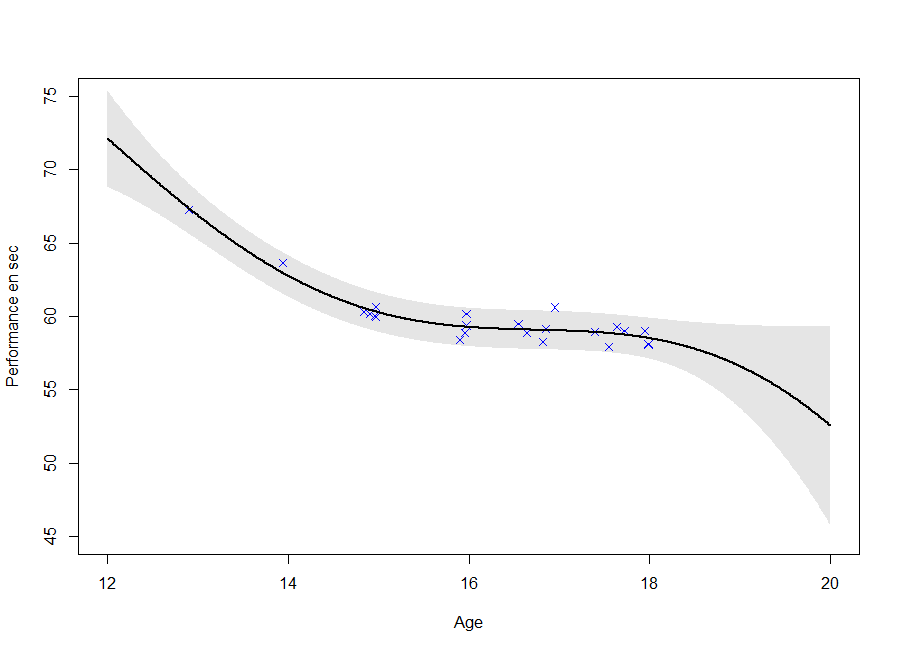
Visualization of GPR
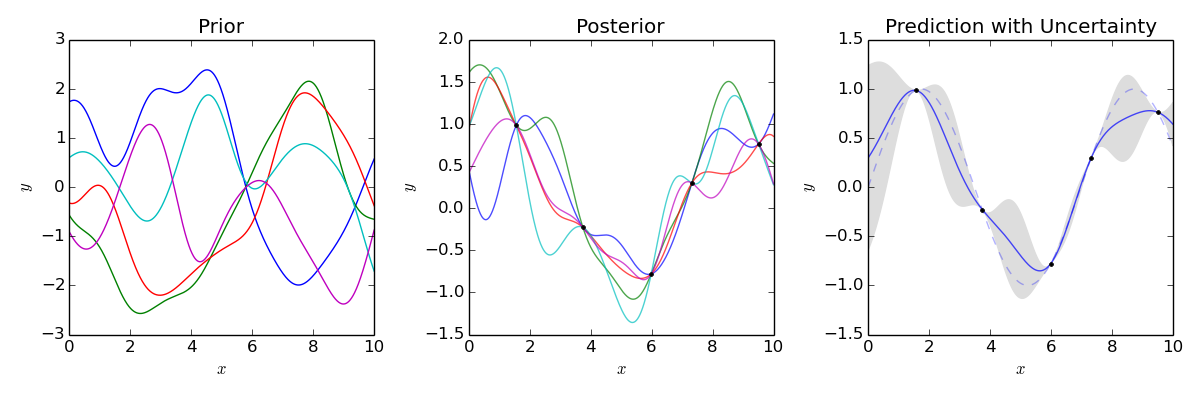
Key points:
- Define a covariance function with desirable properties
- Non parametric method giving probabilistic predictions
- Complexity \(O(\color{red}{N^3})\) (inversion of an \(\color{red}{N} \times \color{red}{N}\) matrix)
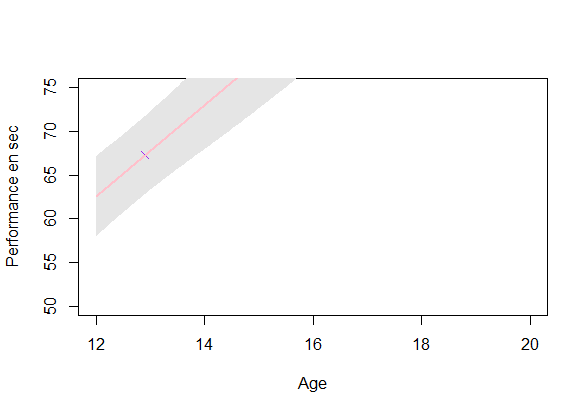
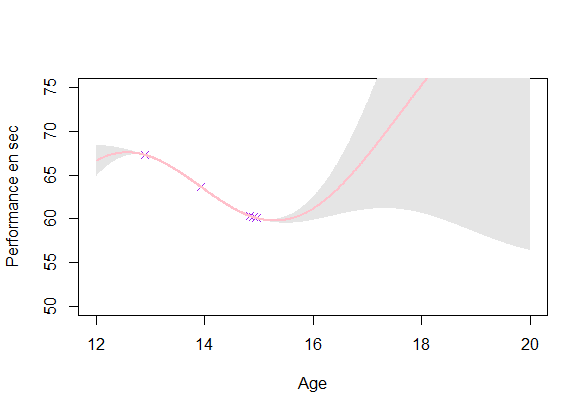
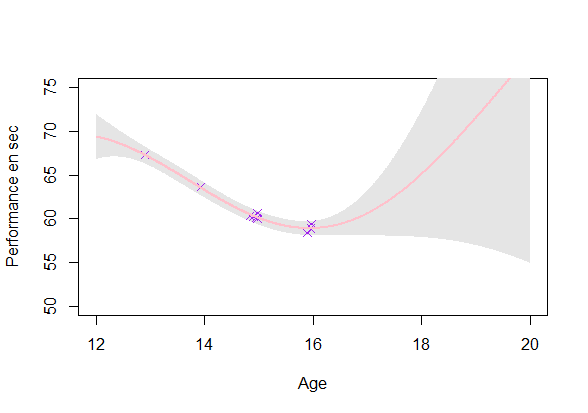
GP estimation from data
Estimating a GP on each individual (\(O(\color{green}{N_i^3})\)):
GP estimation from data
Estimating a GP on each individuals (\(O(\color{green}{N_i^3})\)):
GP estimation from data
Estimating a GP on each individuals (\(O(\color{green}{N_i^3})\)):
GP estimation from data
Estimating a GP on each individuals (\(O(\color{green}{N_i^3})\)):
GP estimation from data
Estimating a GP on each individuals (\(O(\color{green}{N_i^3})\)):
Reaching a coherent modeling
Estimating a GP on each individuals (\(O(\color{green}{N_i^3})\)):
- Uncertainty: Ok
- Coherence: Improvement required
\(\rightarrow\) Using the shared information between individuals (GPR-ME)
The GPFR model
Shi & Wang - 2008 | Shi & Choi - 2011
\[y_i(t) = \mu_0(t) + f_i(t) + \epsilon_i\] with:
- \(\mu_0(t) = \sum\limits_{k =1}^{K} \alpha_k \mathcal{B}_k(t)\) with \((\mathcal{B}_k)_k\) a spline basis
- \(f_i(\cdot) \sim \mathcal{GP}(0, \Sigma_{\theta_i}(\cdot,\cdot)), \ f_i \perp \!\!\! \perp\)
- \(\epsilon_i \sim \mathcal{N}(0, \sigma_i^2), \ \epsilon_i \perp \!\!\! \perp\)
GPFDA R package
Limits:
- No uncertainty about \(\mu_0\)
- Does not allow irregular time series
Multi-task Gaussian processes with common mean (MAGMA)
\[y_i(t) = \mu_0(t) + f_i(t) + \epsilon_i\] with:
- \(\mu_0(\cdot) \sim \mathcal{GP}(m_0(\cdot), K_{\theta_0}(\cdot,\cdot))\)
- \(f_i(\cdot) \sim \mathcal{GP}(0, \Sigma_{\theta_i}(\cdot,\cdot)), \ f_i \perp \!\!\! \perp\)
- \(\epsilon_i \sim \mathcal{N}(0, \sigma_i^2), \ \epsilon_i \perp \!\!\! \perp\)
It follows that:
\[y_i(\cdot) \vert \mu_0 \sim \mathcal{GP}(\mu_0(\cdot), \Sigma_{\theta_i}(\cdot,\cdot) + \sigma_i^2), \ y_i \vert \mu_0 \perp \!\!\! \perp\]
\(\rightarrow\) Shared information through \(\mu_0\) and its uncertainty \(\rightarrow\) Unified non parametric probabilistic framework \(\rightarrow\) Effective even for irregular time series
Notations
\(\textbf{y} = (y_1^1,\dots,y_i^k,\dots,y_M^{N_M})^T\) \(\textbf{t} = (t_1^1,\dots,t_i^k,\dots,t_M^{N_M})^T\) \(\Theta = \{ \theta_0, (\theta_i)_i, \sigma_i^2 \}\)
\(K\): covariance matrix from the process \(\mu_0\) evaluated on \(\textbf{t}\)
\(K = \left[ K_{\theta_0}(t_i^k, t_j^l) \right]_{(i,j), (k,l)}\)
\(\Sigma_i\): covariance matrix from the process \(f_i\) evaluated on \(\textbf{t}_i\)
\(\Sigma_i = \left[ \Sigma_{\theta_i}(t_i^k, t_i^l) \right]_{(k,l)} \ \ \forall i = 1, \dots, M\)
\(\Psi_i = \Sigma_i + \sigma_i^2 I_{N_i}\)
Bayes' law is the new black
Reminder of its simple definition:
\[ \mathbb{P}(T \vert D) = \dfrac{\mathbb{P}(D \vert T) \mathbb{P}(T)}{\mathbb{P}(D)} \] Powerful implication when it comes to learning from data:
- \(\mathbb{P}(T)\), probability of your theory, what you think a priori
- \(\mathbb{P}(D \vert T)\), probability of data if theory is true, likelihood
- \(\mathbb{P}(D)\), probability that your data occur, norm. constant
Bayes' law tells you how and what you should learn on theory T according to data D:
\(\rightarrow \mathbb{P}(T \vert D)\), what you should think a posteriori Computational burden, among solutions: empirical Bayes
Learning HPs and \(\mu_0\) : an EM algorithm
Step E: Computing the posterior (knowing \(\Theta\))
\[
\begin{align}
p(\mu_0(\textbf{t}) \vert \textbf{t}, \textbf{y}, \Theta)
&\propto p(\textbf{y} \vert \textbf{t}, \mu_0(\textbf{t}), \Theta) \ p(\mu_0(\textbf{t}) \vert \textbf{t}, \Theta) \\
&\propto \prod\limits_{i =1}^M \mathcal{N}( \mu_0(\textbf{t}_i), \Psi_i) \ \mathcal{N}(m_0(\textbf{t}), K) \\
&= [Insert \ here \ some \ PhD \ student \ ideas] \\
&= \mathcal{N}( \hat{m}_0(\textbf{t}), \hat{K})
\end{align}
\]
Step M: Estimating \(\Theta\) (knowing \(p(\mu_0)\))
\[\hat{\Theta} = \underset{\Theta}{\arg\max} \ \mathbb{E}_{\mu_0} [ \log \ p(\textbf{y}, \mu_0(\textbf{t}) \vert \textbf{t}, \Theta ) \ \vert \Theta]\]
Initialize hyperparameters
while(sufficient condition of convergence){
Iterate alternatively steps E and M}
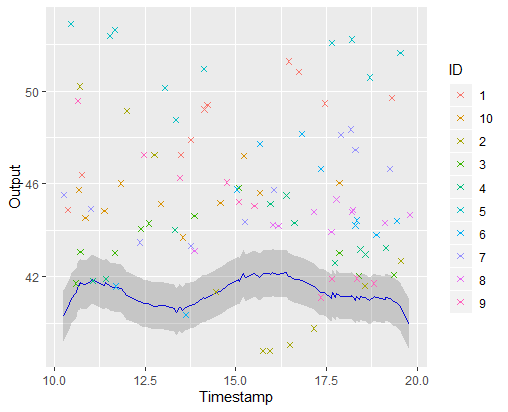
A picture is worth 1000 words
\(\mathbb{E} \left[ \mu_0(\textbf{t}) \vert Data \right] \pm CI_{0.95}\)
Iteration counter : 0
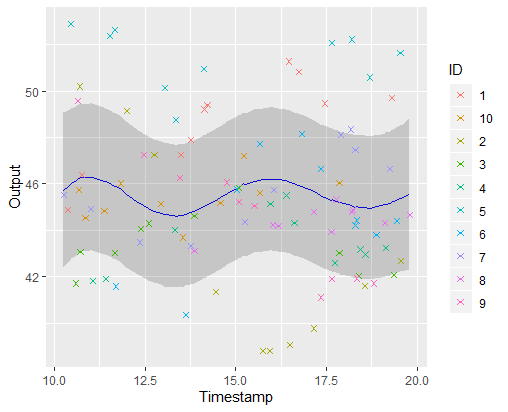
A picture is worth 1000 words
\(\mathbb{E} \left[ \mu_0(\textbf{t}) \vert Data \right] \pm CI_{0.95}\)
Iteration counter : 1
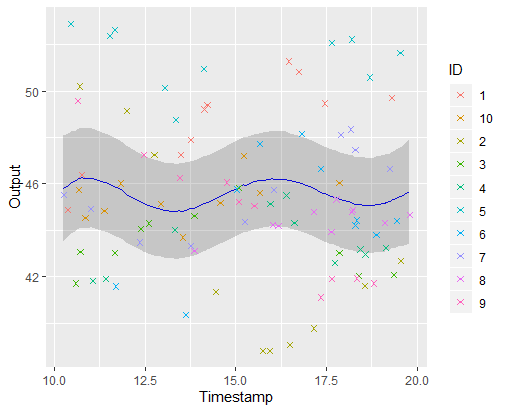
A picture is worth 1000 words
\(\mathbb{E} \left[ \mu_0(\textbf{t}) \vert Data \right] \pm CI_{0.95}\)
Iteration counter : 2
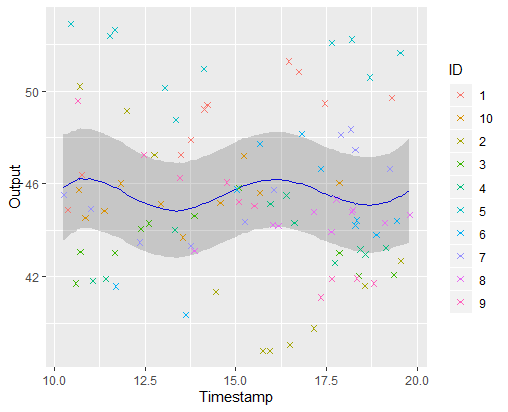
A picture is worth 1000 words
\(\mathbb{E} \left[ \mu_0(\textbf{t}) \vert Data \right] \pm CI_{0.95}\)
Iteration counter : 4
A picture is worth 1000 words
\(\mathbb{E} \left[ \mu_0(\textbf{t}) \vert Data \right] \pm CI_{0.95}\)
Iteration counter : 6 \(\rightarrow\) break and return
Making predictions
\[ \forall i, \ \ y_i(t) = \mu_0(t) + f_i(t) + \epsilon_i \]
Suppose that, after the learning step, you observe some data \(y_*(\textbf{t}_*)\) from a new individual, and want to make predictions at timestamps \(\textbf{t}^p\).
Multi-task learning consists in improving performance by sharing information across individuals.
Without external information:
\(p(\begin{bmatrix} y_*^{\textbf{t}_*} \\ y_*^{\textbf{t}_p} \\ \end{bmatrix}) = \mathcal{N}( \begin{bmatrix} \mu_0^{\textbf{t}_*} \\ \mu_0^{\textbf{t}^p} \\ \end{bmatrix}, \begin{pmatrix} \Psi_*^{\textbf{t}_*,\textbf{t}_*} & \Psi_*^{\textbf{t}_*,\textbf{t}^p} \\ \Psi_*^{\textbf{t}^p,\textbf{t}_*} & \Psi_*^{\textbf{t}^p,\textbf{t}^p} \end{pmatrix})\)
Making predictions: the key idea
Multi-task regression : conditioning on other observations Incertitude on the mean process : integrate over \(\mu_0\)
\[\begin{align}
p(y_* \vert \textbf{y})
&= \int p(y_*, \mu_0 \vert \textbf{y}) \ d \mu_0\\
&\underbrace{=}_{Bayes} \int p(y_* \vert \textbf{y}, \mu_0) p(\mu_0 \vert \textbf{y}) \ d \mu_0 \\
&\underbrace{=}_{(y_i \vert \mu_0)_i \perp \!\!\! \perp} \int p(y_* \vert \mu_0) p(\mu_0 \vert \textbf{y}) \ d \mu_0 \\
&= \int \mathcal{N}(y_*; \mu_0, \Psi_*) \mathcal{N}(\mu_0; \hat{m}_0, \hat{K}) \ d \mu_0 \\
&= \mathcal{N}( \hat{m}_0, \Gamma_* = \Psi_* + \hat{K})
\end{align}\]
Making predictions: additional steps
\(\hat{\theta}_*, \hat{\sigma}_*^2 = \underset{\theta_*, \sigma_*^2}{\arg\max} \ \mathbb{E}_{\mu_0} [ \log \ p(\textbf{y}_*(\textbf{t}_*), \mu_0(\textbf{t}_*) \vert \theta_*, \sigma_*^2 )]\)
Prior: \(p(\begin{bmatrix} y_*^{\textbf{t}_*} \\ y_*^{\textbf{t}_p} \\ \end{bmatrix} \vert \textbf{y}) = \mathcal{N}( \begin{bmatrix} \hat{m}_0^{\textbf{t}_*} \\ \hat{m}_0^{\textbf{t}_p} \\ \end{bmatrix}, \begin{pmatrix} \Gamma_{**} & \Gamma_{*p} \\ \Gamma_{p*} & \Gamma_{pp} \end{pmatrix})\)
Posterior: \(p(y_*^{\textbf{t}^p} \vert y_*^{\textbf{t}_*}, \textbf{y}) = \mathcal{N} \Big( \hat{\mu}_{*}^{\textbf{t}^p} , \hat{\Gamma}_{*}^{\textbf{t}^p} \Big)\)
with:
- \(\hat{\mu}_{*}^{\textbf{t}^p} = \hat{m}_0^{\textbf{t}_p} + \Gamma_{p*}\Gamma_{**}^{-1} (y_*^{\textbf{t}_*} - \hat{m}_0^{\textbf{t}_*})\)
- \(\hat{\Gamma}_{*}^{\textbf{t}^p} = \Gamma_{pp} - \Gamma_{p*}\Gamma_{**}^{-1} \Gamma_{*p}\)
A GIF is worth \(10^9\) words
- Same data, same hyperparameters from learning
- Standard GP (left) | MAGMA (right)
A GIF is worth \(10^9\) words
We talked about clustering, did we ?
A unique underlying mean process might be insufficient
\(\rightarrow\) Mixture model of multitask GP:
\[\forall i , \forall k , \ \ y_i(t) \vert (Z_{ik} = 1) = \mu_k(t) + f_i(t) + \epsilon_i\] with:
- \(Z_{i} \sim \mathcal{M}(1, \boldsymbol{\pi} = (\pi_1, \dots, \pi_K)), \ Z_i \perp \!\!\! \perp\)
- \(\mu_k(\cdot) \sim \mathcal{GP}(m_k(\cdot), C_{\gamma_k}(\cdot,\cdot)), \ \mu_k \perp \!\!\! \perp\)
- \(f_i(\cdot) \sim \mathcal{GP}(0, \Sigma_{\theta_i}(\cdot,\cdot)), \ f_i \perp \!\!\! \perp\)
- \(\epsilon_i \sim \mathcal{N}(0, \sigma_i^2), \ \epsilon_i \perp \!\!\! \perp\)
It follows that:
\[y_i(\cdot) \vert \{ (\mu_k)_k, \boldsymbol{\pi} \} \sim \sum\limits_{k=1}^K{\pi_k \ \mathcal{GP}\Big(\mu_k(\cdot), \Psi_i(\cdot, \cdot) \Big)}\]
Learning
We need to learn the following quantities:
- \(p((\mu_k)_k \vert \textbf{y})\), mean processes' hyper-posteriors
- \(p((Z_i)_i \vert \textbf{y})\), clustering variables' hyper-posteriors
- \(\Theta = \{ (\gamma_k)_k, (\theta_i)_i, (\sigma_i^2), \boldsymbol{\pi} \}\), the hyper-parameters
Unfortunately \((\mu_k)_k\) and \((Z_i)_i\) are posterior dependent
\(\rightarrow\) Variational inference, to maintain closed-form approximations. For any distribution \(q\):
\(\log p(\textbf{y} \vert \Theta) = \mathcal{L}(q; \Theta) + KL \big( q \vert \vert p(\boldsymbol{\mu}, \boldsymbol{Z} \vert \textbf{y}, \Theta)\big)\)
Approximation assumption: \(q(\boldsymbol{\mu}, \boldsymbol{Z}) = q_{\boldsymbol{\mu}}(\boldsymbol{\mu})q_{\boldsymbol{Z}}(\boldsymbol{Z})\)
\(\rightarrow\) \(\mathcal{L}(q; \Theta)\) provides a lower bound to maximize
Variational EM
Step E: Optimize \(\mathcal{L}(q; \Theta)\) w.r.t. \(q\)
\(\hat{q}_{\boldsymbol{Z}}(\boldsymbol{Z}) = \prod\limits_{i = 1}^M \mathcal{M}(Z_i;1, \boldsymbol{\tau}_i)\)
\(\hat{q}_{\boldsymbol{\mu}}(\boldsymbol{\mu}) = \prod\limits_{k = 1}^K \mathcal{N}(\mu_k;\hat{m}_k, \hat{C}_k)\)
Step M: Optimize \(\mathcal{L}(q; \Theta)\) w.r.t. \(\Theta\)
- \(\hat{\Theta} = \text{arg}\max\limits_{\Theta} \mathbb{E}_{\boldsymbol{\mu},\boldsymbol{Z}} \left[ \log p(\textbf{y},\boldsymbol{\mu}, \boldsymbol{Z} \vert \Theta)\right]\)
\(\rightarrow\) Iterate on these steps until convergence
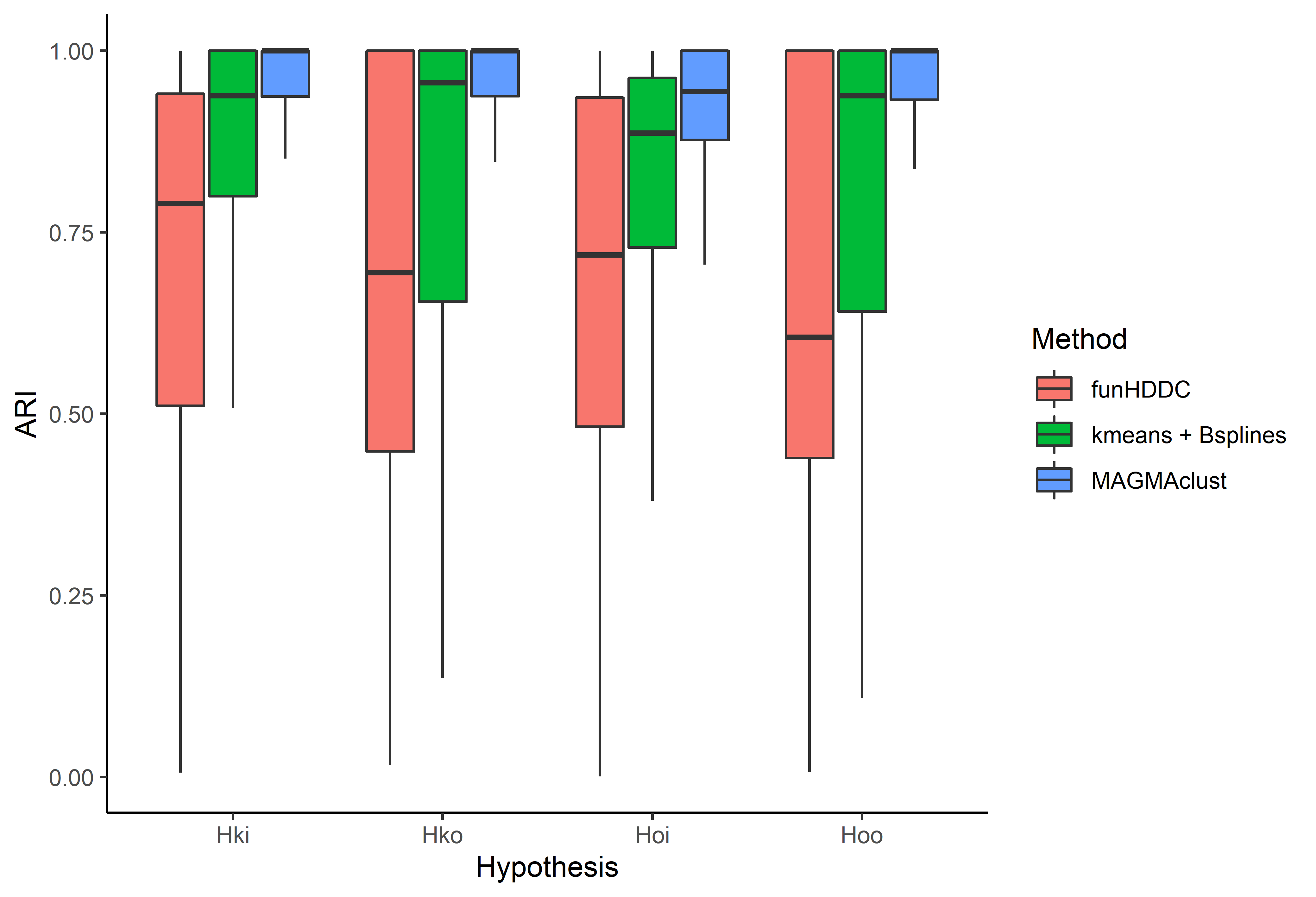
4 different model assumptions
- \(\mathcal{H}_{oo}: \gamma_0 = \gamma_k, \theta_0 = \theta_i, \sigma_0^2 = \sigma_i^2, \ \forall i, \forall k\)
- \(\mathcal{H}_{ko}: \gamma_k \neq \gamma_l, \theta_0 = \theta_i, \sigma_0^2 = \sigma_i^2, \ \forall i, \forall k,l\)
- \(\mathcal{H}_{oi}: \gamma_0 = \gamma_k, \theta_i \neq \theta_j, \sigma_i^2 \neq \sigma_j^2, \ \forall i,j, \forall k\)
- \(\mathcal{H}_{ki}: \gamma_0 \neq \gamma_k, \theta_0 \neq \theta_i, \sigma_0^2 \neq \sigma_i^2, \ \forall i,j, \forall k,l\)
\(\rightarrow\) Allows a multi-task aspect on the covariance structure, and a compromise between number of hyper-parameters and flexibility:
- \(\mathcal{H}_{oo}\): 3 hyper-parameters
- \(\mathcal{H}_{ko}\): K + 2 hyper-parameters
- \(\mathcal{H}_{oa}\): 2M + 1 hyper-parameters
- \(\mathcal{H}_{ki}\): 2M + K hyper-parameters
Prediction
EM for estimating \(Z_*, \theta_*,\) and \(\sigma_*^2\)
Multi-task prior: \(p(\begin{bmatrix} y_*^{\textbf{t}_*} \\ y_*^{\textbf{t}_p} \\ \end{bmatrix} \vert Z_{*k}=1 , \textbf{y}) = \mathcal{N}( \begin{bmatrix} \hat{m}_k^{\textbf{t}_*} \\ \hat{m}_k^{\textbf{t}_p} \\ \end{bmatrix}, \begin{pmatrix} \Gamma_{**}^k & \Gamma_{*p}^k \\ \Gamma_{p*}^k & \Gamma_{pp}^k \end{pmatrix}), \forall k\)
Multi-task posterior: \(p(y_*^{\textbf{t}^p} \vert y_*^{\textbf{t}_*}, Z_{*k} = 1, \textbf{y}) = \mathcal{N} \big( \hat{\mu}_{*k}^{\textbf{t}^p} , \hat{\Gamma}_{*k}^{\textbf{t}^p} \big), \ \forall k\)
Predictive multi-task GPs mixture: \(p(y_*^{\textbf{t}^p} \vert y_*^{\textbf{t}_*}, \textbf{y}) = \sum\limits_{k = 1}^{K} \tau_{*k} \ \mathcal{N} \big( \hat{\mu}_{*k}^{\textbf{t}^p} , \hat{\Gamma}_{*k}^{\textbf{t}^p} \big)\)
Illustration: GP regression
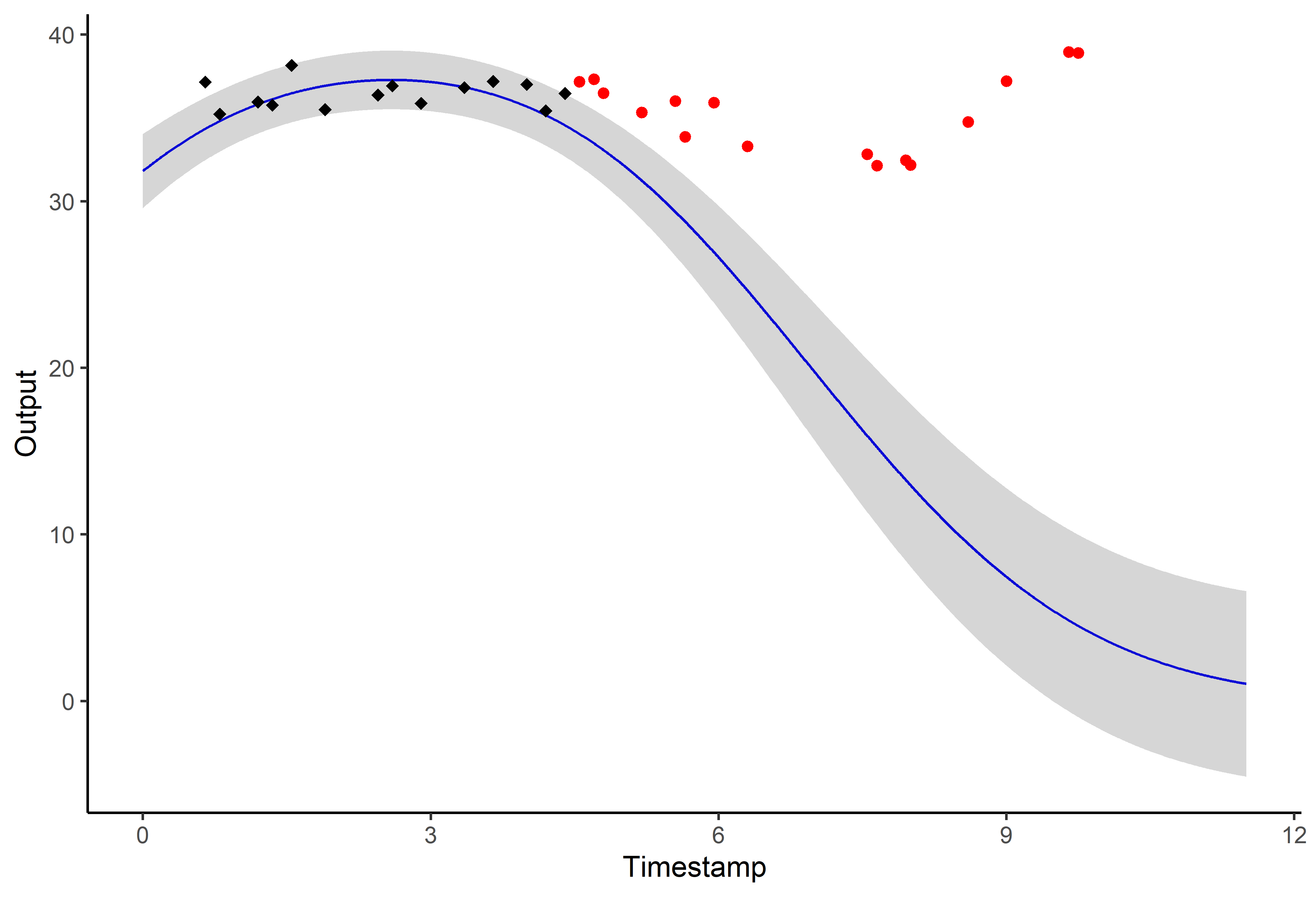
Illustration: MAGMA
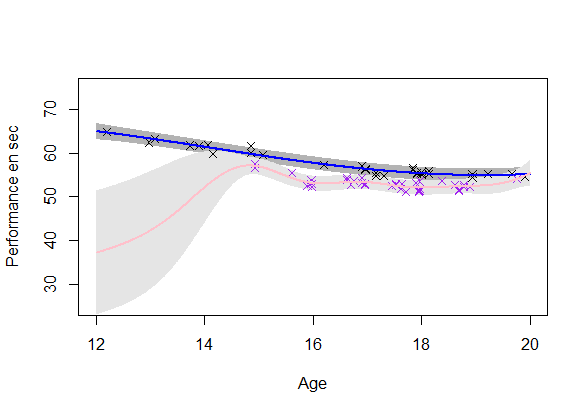
Illustration: MAGMAclust
Illustration: MAGMAclust
Estimation of the mean processes
And what about the swimmers ?
|
|
Simu
|
Simu
|
Real data
|
Real data
|
|
|
MSE
|
\(CI_{95}\)
|
MSE
|
\(CI_{95}\)
|
|
GP
|
87.5 (151.9)
|
74.0 (32.7)
|
25.3 (97.6)
|
72.7 (37.1)
|
|
GPFDA
|
31.8 (49.4)
|
90.4 (18.1)
|
|
|
|
MAGMA
|
18.7 (31.4)
|
93.8 (13.5)
|
3.8 (10.3)
|
95.3 (15.9)
|
Did I mention that I like GIFs ?
Why probabilistic predictions matter ?
Making a prediction is \(\mathbb{P}(\)saying something wrong\() \simeq 1\).
A probabilistic prediction tells you how much:
Perspectives
Enable association with sparse GP approximations
Extend to multivariate functional regression
Work on an online version
Develop a more sophisticated model selection tool
Integrate to the app and launch tests with FFN
Listen to new good ideas that you are about to give me
References
Pattern Recognition and Machine Learning - Bishop - 2006
Gaussian processes for machine learning - Rasmussen & Williams - 2006
Curve prediction and clustering with mixtures of Gaussian process [...] - Shi & Wang - 2008
Gaussian Process Regression Analysis for Functional Data - Shi & Choi - 2011
Career Performance Trajectories in Track and Field Jumping Events [...] - Boccia & al - 2017
Efficient Bayesian hierarchical functional data analysis [...] - Yang & al - 2017
Excelling at youth level in competitive track and field [...] - Kearney & Hayes - 2018
Functional Data Analysis in Sport Science: Example of Swimmers' [...] - Leroy & al. - 2018
MAGMA: Inference and Prediction with Multi-Task Gaussian Processes - Leroy & al. - preprint Cluster-Specific Predictions with Multi-Task Gaussian Processes - Leroy & al. - preprint
A cat GIF is priceless